Japan’s Ball-Shaped Lunar Rover Makes History With Autonomous Moon Exploration
Japan’s tiny spherical rover rolls on the Moon, snapping images and pioneering autonomous space exploration

A compact, sphere‑shaped robot rolled across the Moon during Japan’s inaugural lunar touchdown, documenting the inverted SLIM lander and its surroundings and offering fresh data on autonomous planetary missions.
Japan’s Shape‑Shifting Rover Breaks New Ground
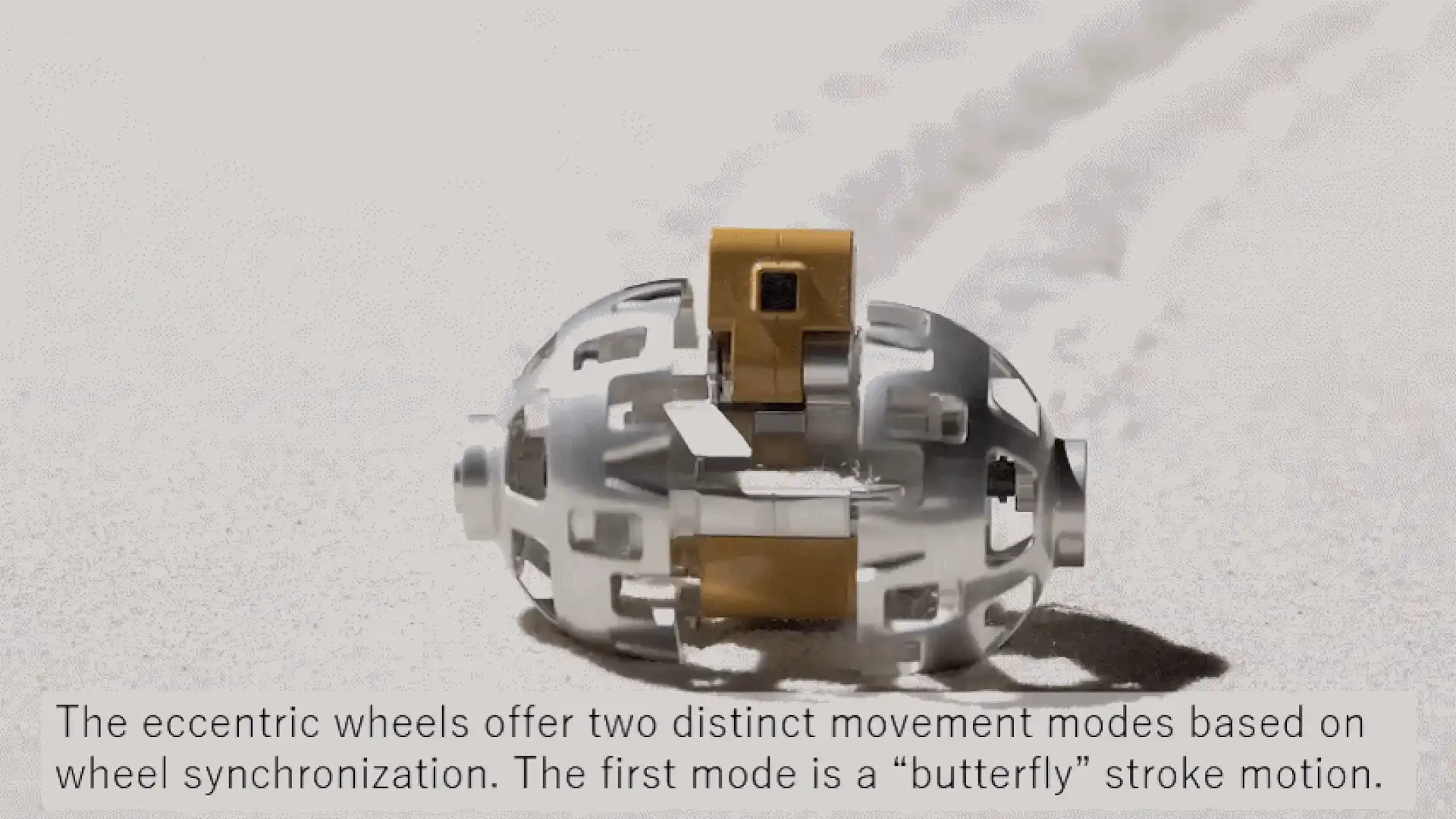
The Smart Lander for Investigating Moon (SLIM) mission featured a miniature rover that can change its form to tackle irregular lunar terrain. Roughly the size of a palm, the spherical robot can roll, crawl and reconfigure itself, echoing the mobility of the BB‑8 droid from Star Wars. Researchers highlighted that this adaptability allowed the rover to reach zones the stationary lander could not, expanding the view of the lunar surface, according to a June 10 report in Science Robotics.
The rover’s modular architecture marks a departure from conventional wheeled designs. By morphing its shape, the robot can negotiate obstacles and delicate terrain without direct human control. “The results highlight the potential of such platforms … as independent explorers, capable of accessing environments beyond the reach of a primary large spacecraft,” wrote the study team led by Daichi Hirano of the Japan Aerospace Exploration Agency (JAXA).
Mission Performance and Key Findings
During an approximate 100‑minute stint on the Moon, the rover operated autonomously around the SLIM lander, gathering high‑resolution images of the craft and its immediate environment, then beaming selected pictures back to Earth via wireless link.
“The palm-sized rover accomplished autonomous lunar exploration by navigating around the SLIM lander, capturing images of both the SLIM lander and its environment and transmitting selected images through wireless communication on the lunar surface,” the team explained.
The experiment proved that tiny, self‑directed robots can supplement larger spacecraft, delivering detailed observations while keeping mission risk low. The data collected will inform the design of future robotic systems capable of operating in harsh extraterrestrial settings, accelerating the pace of scientific acquisition.
Future Directions for Planetary Robotics
The success of this mission points to a shift away from sole reliance on heavyweight rovers toward swarms of small, intelligent machines that perform focused tasks. “In the long term, this approach may enable more flexible, robust, and cost‑effective planetary exploration missions,” the authors noted. By marrying autonomy, versatile locomotion and real‑time communication, such platforms could reach locales previously deemed inaccessible, opening new research horizons.
Insights from the lunar test will help engineers and planners refine the architecture, functionality and operational concepts of distributed robotic explorers, ensuring they complement larger assets while delivering high‑value scientific returns.
This article has been fact checked for accuracy, with information verified against reputable sources. Learn more about us and our editorial process.
Last reviewed on .
Article history
- Latest version
Reference(s)
- Hirano, D.., et al. “From ball to rover: Transformable palm-sized rover SORA-Q for autonomous lunar exploration.” Science Robotics, vol. 11, no. 115, June 10, 2026 American Association for the Advancement of Science (AAAS), doi: 10.1126/scirobotics.aec8039. <http://www.science.org/doi/10.1126/scirobotics.aec8039?adobe_mc=MCMID%3D29964536201664010600758910813853020159%7CMCORGID%3D242B6472541199F70A4C98A6%2540AdobeOrg%7CTS%3D1781011857>.
Cite this page:
- Posted by David Anderson